-
微信二維碼

-
熱線電話
×電話
張經(jīng)理
17203711177
- 返回頂部
張經(jīng)理
17203711177
|
|
國家煤監(jiān)部門重點(diǎn)扶持企業(yè) |
 咨詢熱線: 咨詢熱線: |
| 透地D波應(yīng)急通信產(chǎn)品、礦山安全通信產(chǎn)品、移動(dòng)寬帶應(yīng)急通信產(chǎn)品 | 17203711177 |


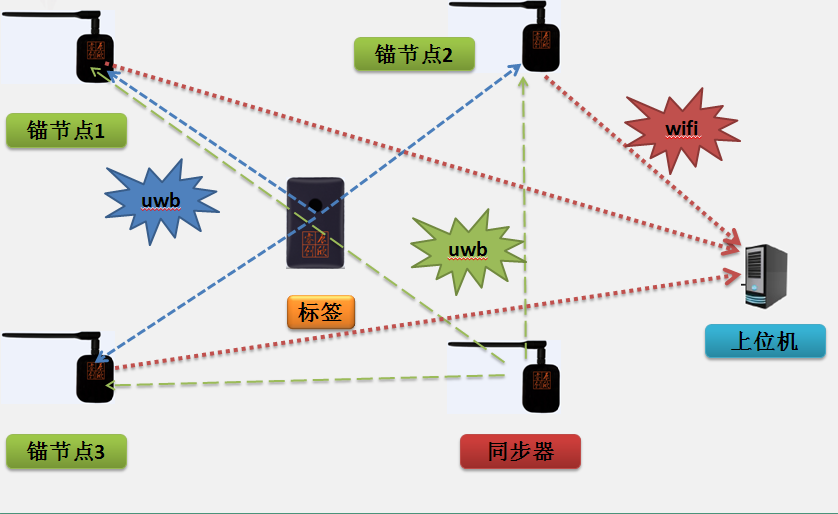
人員定位方案的基礎(chǔ)原理是通過測(cè)量無線信號(hào)的物理特性,結(jié)合幾何或統(tǒng)計(jì)方法,計(jì)算出人員所攜帶標(biāo)簽在空間中的位置。不同的技術(shù)采用不同的基礎(chǔ)原理,決定了系統(tǒng)的定位精度、穩(wěn)定性、成本和適用場(chǎng)景。以下是幾種核心的人員定位基礎(chǔ)原理:
1. 到達(dá)時(shí)間(Time of Arrival, TOA)
- 原理:測(cè)量無線信號(hào)從標(biāo)簽發(fā)射到被多個(gè)已知位置的基站接收所經(jīng)歷的傳播時(shí)間。
- 計(jì)算:距離 = 傳播時(shí)間 × 光速(約 3×10? m/s)。
- 定位方式:利用三個(gè)或以上基站測(cè)得的距離,通過三邊測(cè)量法(Trilateration) 計(jì)算出標(biāo)簽的二維或三維坐標(biāo)。
- 特點(diǎn):
- 定位精度高(可達(dá)厘米級(jí)),常用于UWB系統(tǒng)。
- 要求標(biāo)簽與所有基站之間嚴(yán)格時(shí)間同步。
- 對(duì)時(shí)鐘精度要求高,系統(tǒng)實(shí)現(xiàn)復(fù)雜。
2. 到達(dá)時(shí)間差(Time Difference of Arrival, TDOA)
- 原理:測(cè)量同一信號(hào)到達(dá)兩個(gè)不同基站的時(shí)間差,該時(shí)間差對(duì)應(yīng)標(biāo)簽到兩基站的距離差,形成一條雙曲線。多個(gè)時(shí)間差可確定多條雙曲線,其交點(diǎn)即為位置。
- 定位方式:基于雙曲線定位法求解坐標(biāo)。
- 特點(diǎn):
- 基站之間需同步,但標(biāo)簽無需精確同步,系統(tǒng)更易部署。
- 抗干擾能力強(qiáng),適合大范圍、高并發(fā)場(chǎng)景。
- 廣泛應(yīng)用于UWB、LoRa等系統(tǒng)。
3. 到達(dá)角(Angle of Arrival, AOA)
- 原理:利用天線陣列接收信號(hào),通過分析信號(hào)到達(dá)不同天線的相位差,計(jì)算出信號(hào)的入射方向(角度)。
- 定位方式:兩個(gè)或多個(gè)基站測(cè)得角度后,通過三角測(cè)量法(Triangulation) 確定交點(diǎn)位置。
- 特點(diǎn):
- 可實(shí)現(xiàn)方向性定位,適合空間引導(dǎo)。
- 易受多徑效應(yīng)(信號(hào)反射)影響,需良好環(huán)境設(shè)計(jì)。
- 常用于藍(lán)牙AOA、Wi-Fi 6/7定位。
4. 接收信號(hào)強(qiáng)度指示(RSSI, Received Signal Strength Indicator)
- 原理:無線信號(hào)強(qiáng)度隨距離增加而衰減。通過測(cè)量標(biāo)簽信號(hào)在多個(gè)基站接收到的信號(hào)強(qiáng)度(dBm值),估算其與基站的距離。
- 定位方式:
- 三邊法:結(jié)合多個(gè)基站的RSSI估算距離后定位。
- 指紋定位:預(yù)先采集環(huán)境中各位置的信號(hào)特征(“指紋”),定位時(shí)匹配實(shí)時(shí)信號(hào)與數(shù)據(jù)庫進(jìn)行比對(duì)。
- 特點(diǎn):
- 成本低,藍(lán)牙、Wi-Fi、ZigBee等均支持。
- 易受人體遮擋、墻體、干擾源影響,精度較低(通常1–5米)。
- 指紋定位適應(yīng)復(fù)雜環(huán)境,但需前期建模。
5. 蜂窩網(wǎng)絡(luò)定位
- Cell-ID:根據(jù)終端連接的基站ID確定其所在小區(qū)范圍,精度取決于基站覆蓋半徑。
- OTDOA:類似TDOA,用于4G/5G網(wǎng)絡(luò),通過測(cè)量多個(gè)基站信號(hào)的時(shí)間差實(shí)現(xiàn)定位。
6. 慣性導(dǎo)航(INS, Inertial Navigation System)
- 原理:利用加速度計(jì)和陀螺儀測(cè)量運(yùn)動(dòng)的加速度和角速度,通過積分推算位移和方向,從而估算當(dāng)前位置。
- 特點(diǎn):
- 不依賴外部信號(hào),適合無無線覆蓋環(huán)境(如隧道、地下)。
- 存在累積誤差,需與其他定位技術(shù)(如UWB、藍(lán)牙)融合使用。
7. 指紋定位(Fingerprinting)
- 原理:不直接測(cè)量距離或角度,而是建立“位置-信號(hào)特征”的映射數(shù)據(jù)庫(如Wi-Fi/藍(lán)牙信號(hào)強(qiáng)度組合)。
- 流程:
1. 訓(xùn)練階段:在環(huán)境中多個(gè)點(diǎn)采集信號(hào)特征,建立數(shù)據(jù)庫。
2. 定位階段:將實(shí)時(shí)信號(hào)與數(shù)據(jù)庫匹配,找出相似的位置。
- 特點(diǎn):
- 能適應(yīng)復(fù)雜多變的室內(nèi)環(huán)境。
- 需要前期大量數(shù)據(jù)采集和維護(hù)。
- 常用于Wi-Fi、藍(lán)牙定位系統(tǒng)。
常見技術(shù)與原理對(duì)照表

總結(jié)
人員定位方案的基礎(chǔ)原理主要包括:
- TOA(測(cè)時(shí)間→測(cè)距離)
- TDOA(測(cè)時(shí)間差→測(cè)距離差)
- AOA(測(cè)角度)
- RSSI(測(cè)信號(hào)強(qiáng)度)
- 指紋定位(模式匹配)
- 慣性導(dǎo)航(傳感器積分)
在實(shí)際應(yīng)用中,常采用多技術(shù)融合(如UWB+IMU、藍(lán)牙+Wi-Fi)和智能算法(如卡爾曼濾波、機(jī)器學(xué)習(xí))來提升定位的準(zhǔn)確性、穩(wěn)定性和抗干擾能力。選擇哪種原理,需根據(jù)具體場(chǎng)景對(duì)精度、成本、功耗、部署難度的要求綜合權(quán)衡。
相關(guān)推薦: